Autonomous Mobile Robot (Version 2)
Academic Experiences and ProjectsAutonomous Mobile Robot (Version 2)
Alex McClung, Academic Experiences and Projects
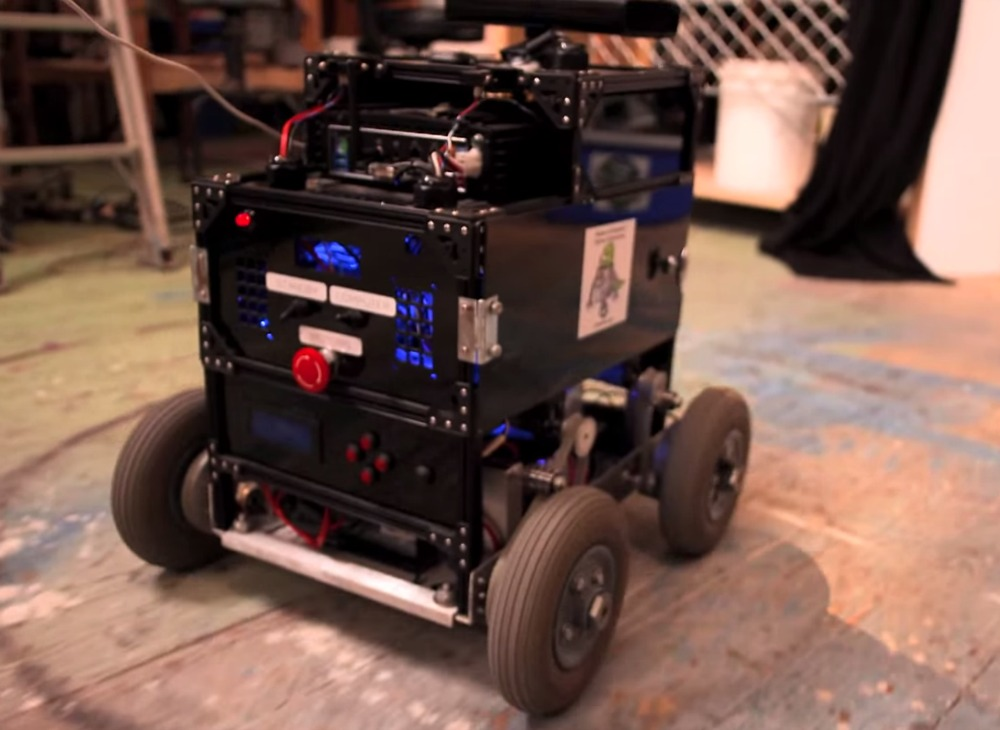
Designed and built an Autonomous Mobile Robot (AMR) which is capable of traversing outdoor terrain autonomously to a given waypoint.
The robot houses a Linux computer running the ROS Framework. It utilises data from a selection of sensors including inertial sensing, wheel encoders, stereo vision and 2D LiDAR, to perform Simultaneous Localisation and Mapping (SLAM) and autonomous navigation.